

Модуль динамики многотел Comsol
Цену уточняйте
Минимальная сумма заказа на сайте — 100 000 ₸
- В наличии
Модуль динамики многотел
Моделировать динамику многотелесных систем
Модуль многотельной динамики, дополнение к программному обеспечению COMSOL Multiphysics, предоставляет продвинутый набор функций для проектирования и оптимизации 2D и 3D многотельных систем с использованием анализа конечных элементов (FEA). Модуль способен моделировать смешанные системы гибких и жёстких тел для поиска критически важных компонентов системы, при этом экономя вычислительные усилия. Это позволяет проводить более детальный структурный анализ на уровне компонентов в основных областях применения, таких как автомобильная инженерия, аэрокосмическая инженерия, биомеханика и другие.®
Модуль включает встроенные мультифизические взаимодействия, такие как акустические взаимодействия с структурой, твёрдый опор и взаимодействия жидкость с множеством тел. Модуль многотельной динамики может сочетаться с другими модулями из продуктового комплекса COMSOL, чтобы включать такие эффекты, как передовой теплообмен, поток жидкостей, акустика и электромагнетизм. Кроме того, моделирование может быть дополнительно расширено, включая нелинейные конструктивные материалы и функциональность импорта CAD. Функциональность RT.
Жёсткие и гибкие детали
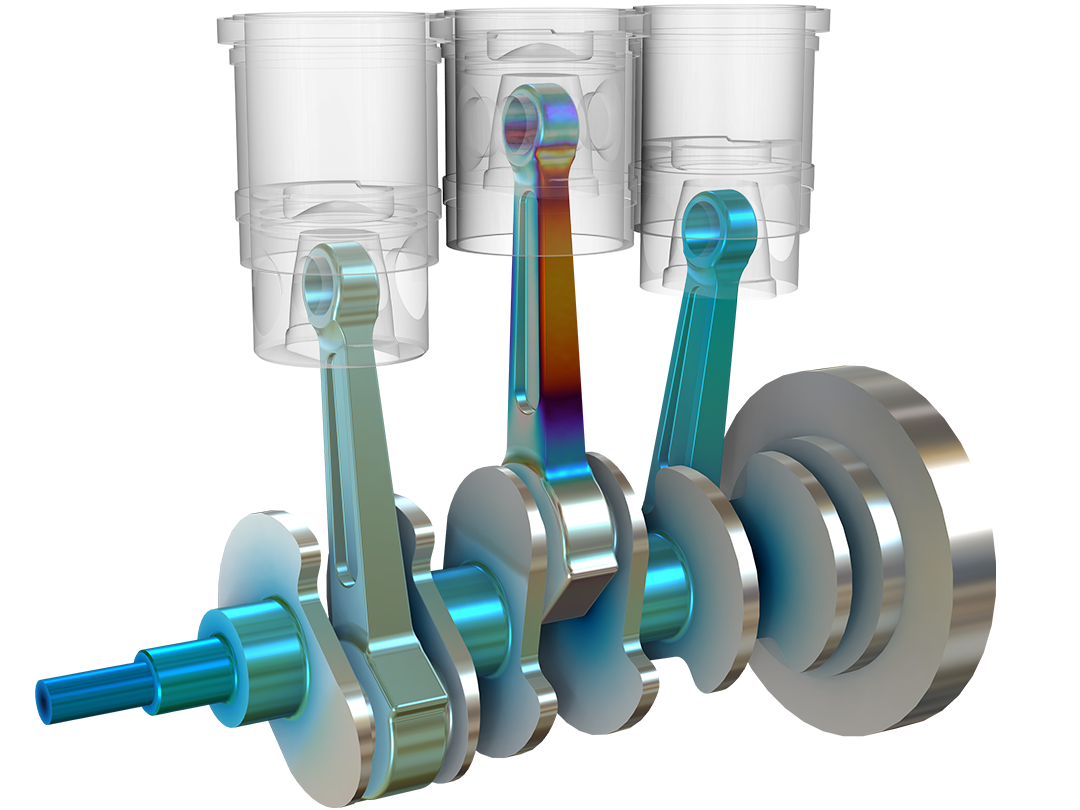
При моделировании многокорпусных систем гибкие и жёсткие тела соединяются с помощью различных типов шарниров, шестерен, кулачков, подшипников, пружин или демпферов и подвергаются большим перемещениям и вращениям. Одним из преимуществ использования модуля динамики многотелий является простота смешивания жёстких и гибких деталей.
В целом, все или большинство частей в многотелесной симуляции являются жёсткими и, следовательно, представлены только степенями свободы жёсткого тела. Однако в некоторых случаях может быть желательно представить одну или несколько частей как гибкие. Используя материальные модели, доступные в модуле, можно выборочно назначать жёсткие и гибкие части модели для детального структурного анализа, включающего влияние нелинейных материалов. Модуль динамики многотелий может использоваться, например, для расчёта сил, возникающих в стыках жёстких частей конструкции, а также напряжений, возникающих в гибких компонентах.
Статический и динамический анализ
Модуль динамики многотел может использоваться для моделирования статического и динамического поведения компонентов, которые подвергаются комбинациям трансляционных и вращательных движений друг относительно друга. Для динамических моделей возможно проводить различные типы анализов, такие как:
- Зависимость от времени
- Собственная частота
- Частотная область
- Суперпозиция режимов
- Случайная вибрация (с модулем структурной механики)
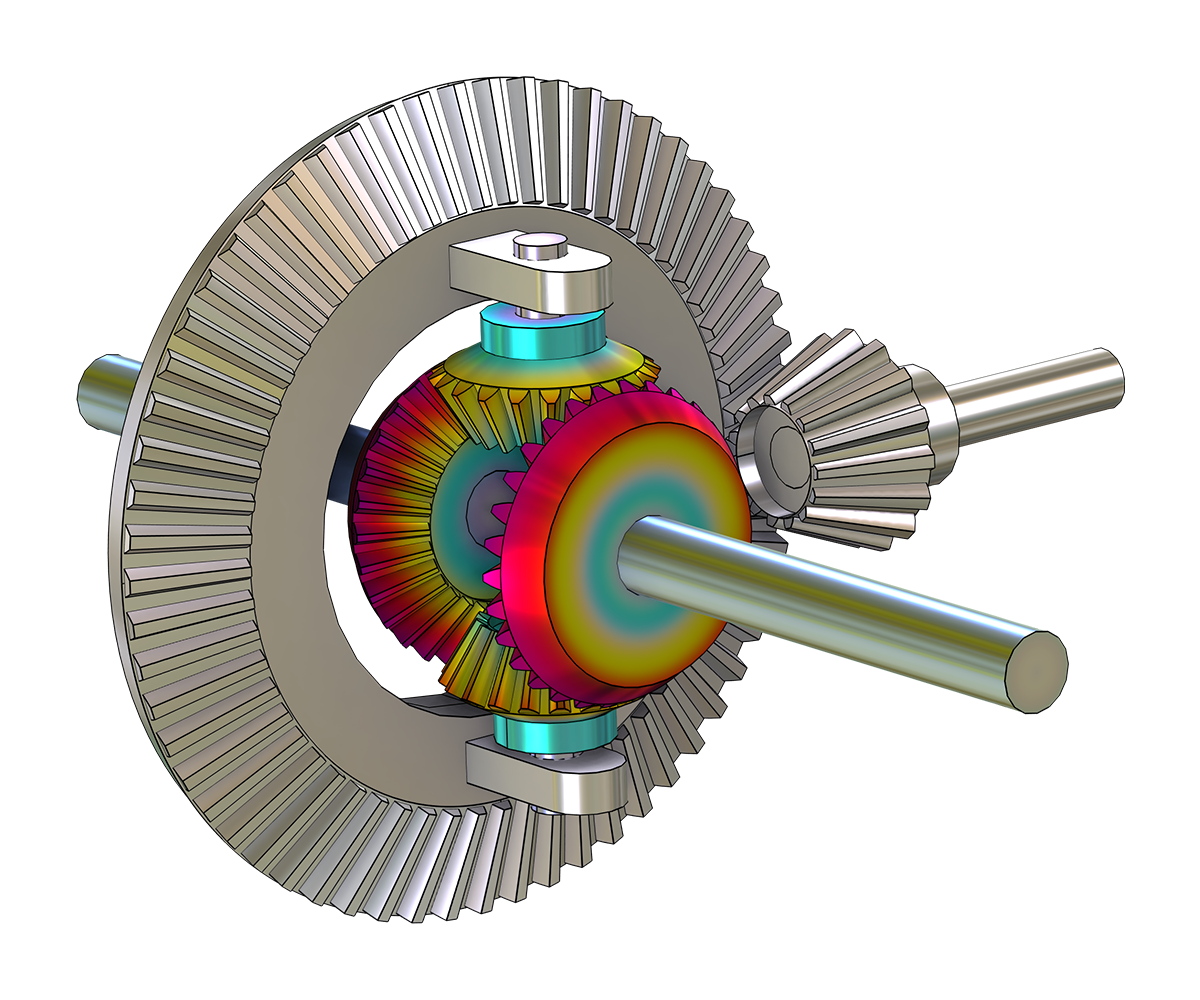
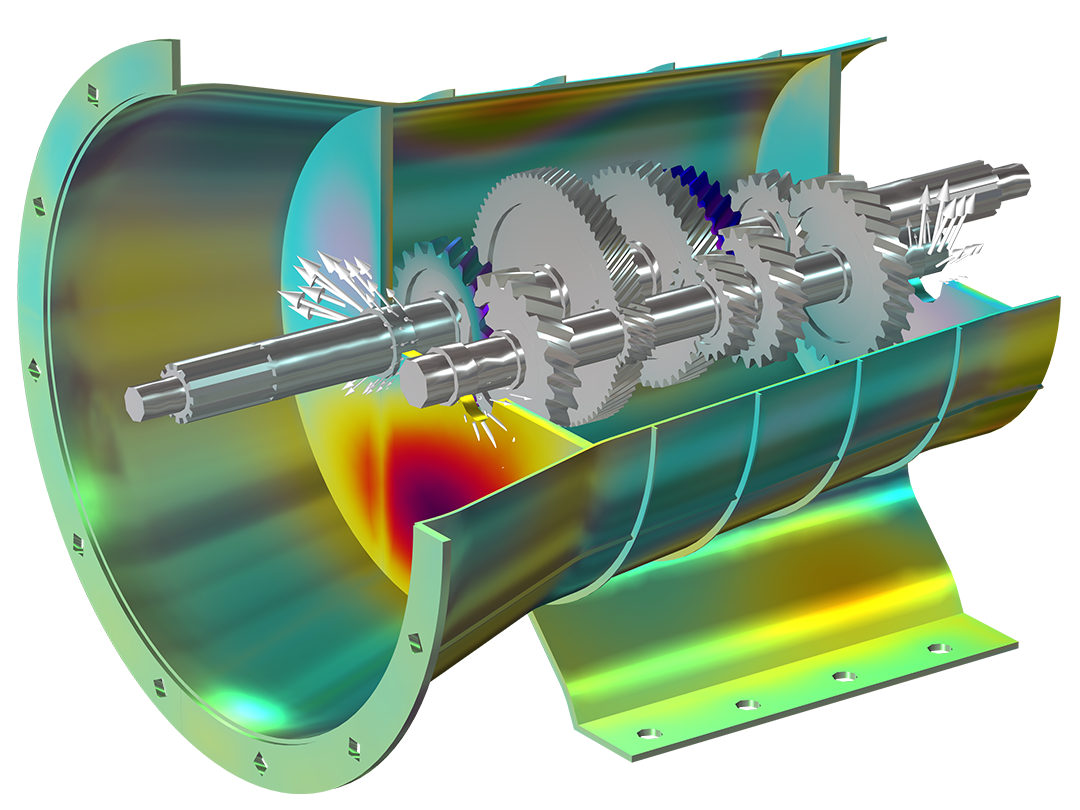
Модуль может использоваться, например, для моделирования динамики компонентов трансмиссии, таких как шестерни или цепи. Результаты многотельного анализа затем могут использоваться для других видов анализа, таких как оценка усталости или акустический анализ для выявления шума, излучаемого системой.
Некоторые примеры величин, которые можно вычислить, — это перемещения, скорости, ускорения, суставные силы, силы контакта шестерни и — в гибких деталях — напряжения. Также можно смоделировать контакт с трением между жёсткими телами, что гораздо более прочно и быстрее по сравнению со стандартным сетчатым контактом.
Функции и функциональность в модуле многотеловой динамики
Проектировать и оптимизировать многотельные системы с помощью программного обеспечения COMSOL.®
Встроенные интерфейсы
При работе с многотелным анализом динамики все этапы процесса моделирования проходят в среде COMSOL Multiphysics. Одной из важнейших особенностей модуля Multibody Dynamics является встроенный интерфейс Multibody Dynamics, который используется для моделирования сборок гибких компонентов, жёстких компонентов или их комбинации. Доступные опции включают моделирование различных типов соединений, шестерёнок, цепных звёздочек и механизмов кулачков. Настройки сетки и решателя автоматически управляются программным обеспечением с опциями ручного редактирования.®
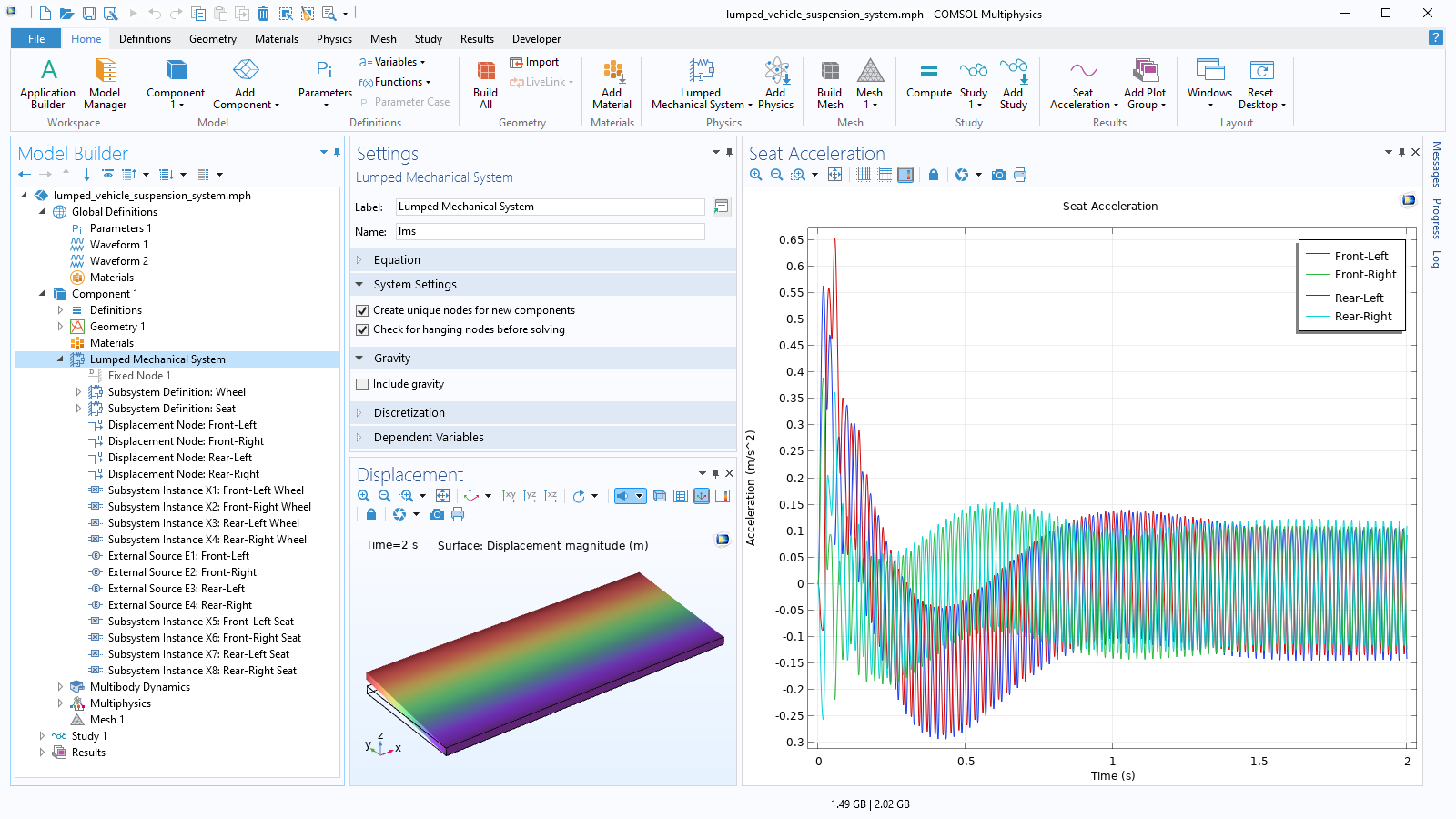
Комбинированные механические системы
Интерфейс Lumped Mechanical System доступен для моделирования абстрактной механической системы с использованием представления схемы с объединёнными компонентами, такими как массы и пружины. Объединённые компоненты могут быть расположены последовательно или параллельно для анализа смещений, скоростей, ускорений и сил.
Мультифизическая связь Lumped-Structure Connection может использоваться для вставки этих систем в модели конечных элементов (FE), построенные с использованием любого интерфейса физики структурной механики.
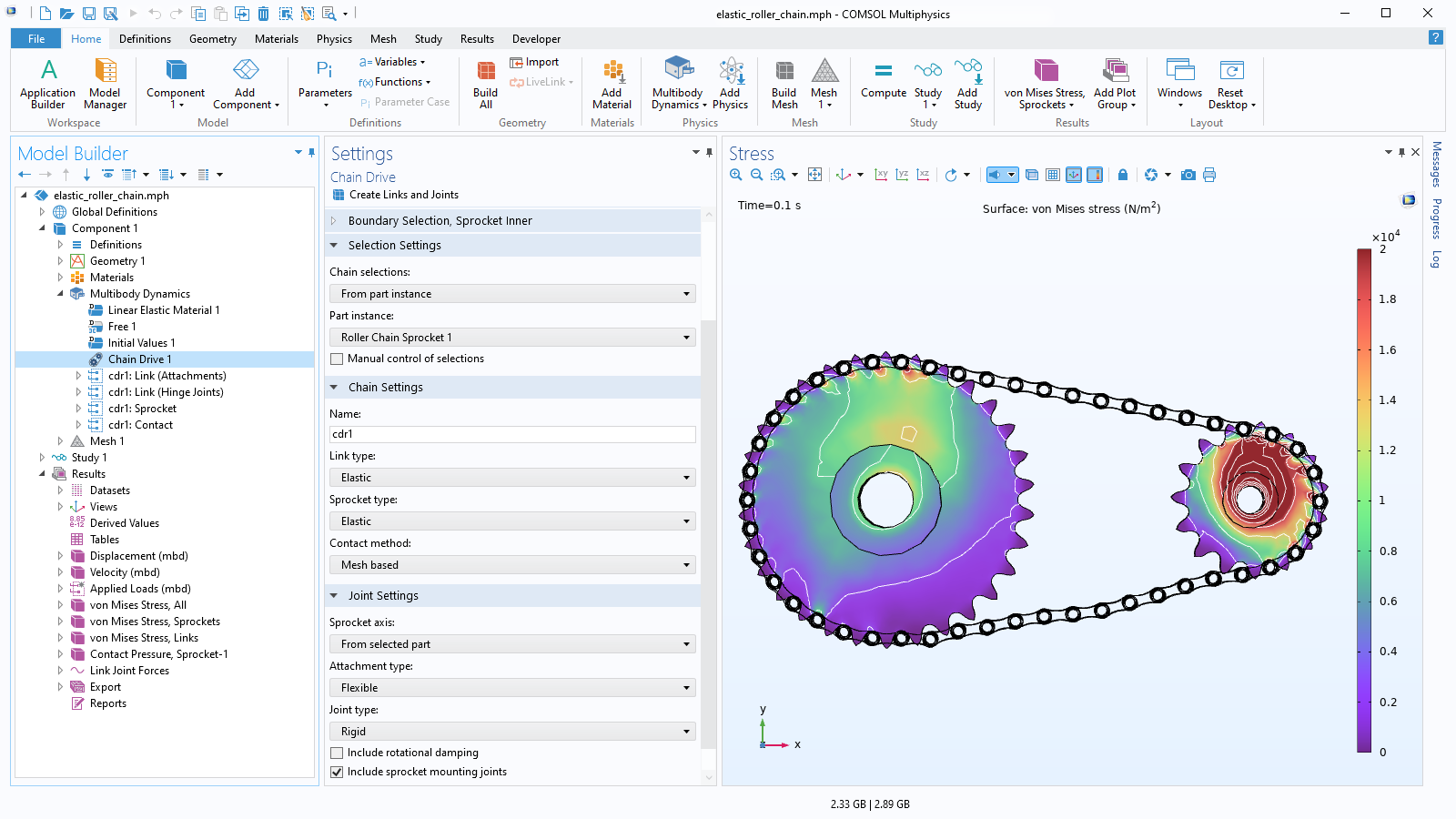
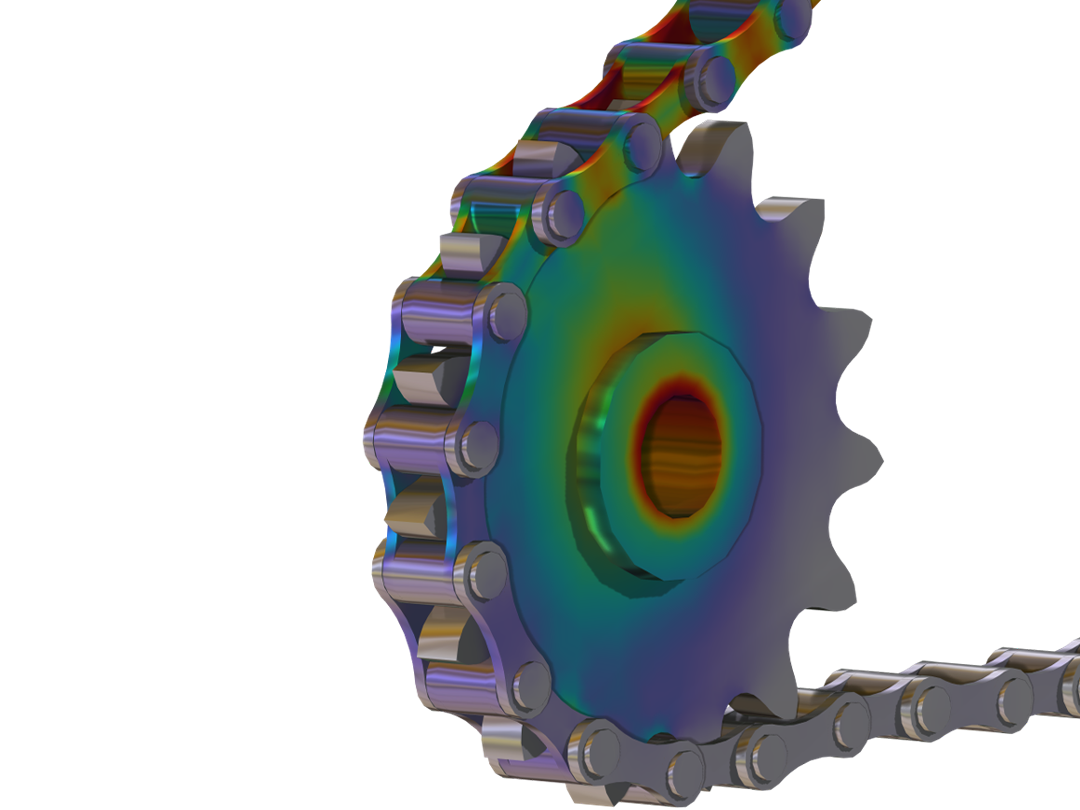
Цепные приводы
Типичный цепной привод — это сборка из двух или более звездочек с цепью, обмотанной вокруг них, которая передаёт механическую мощность от одного вала к другому. Используя функцию цепного привода в интерфейсе Multibody Dynamics, роликовые звёздочки могут моделироваться в 2D или 3D. Эта особенность определяет взаимодействия внутри сборки цепного привода и автоматически генерирует набор многотелесных динамических особенностей, используемых для описания поведения сборки.
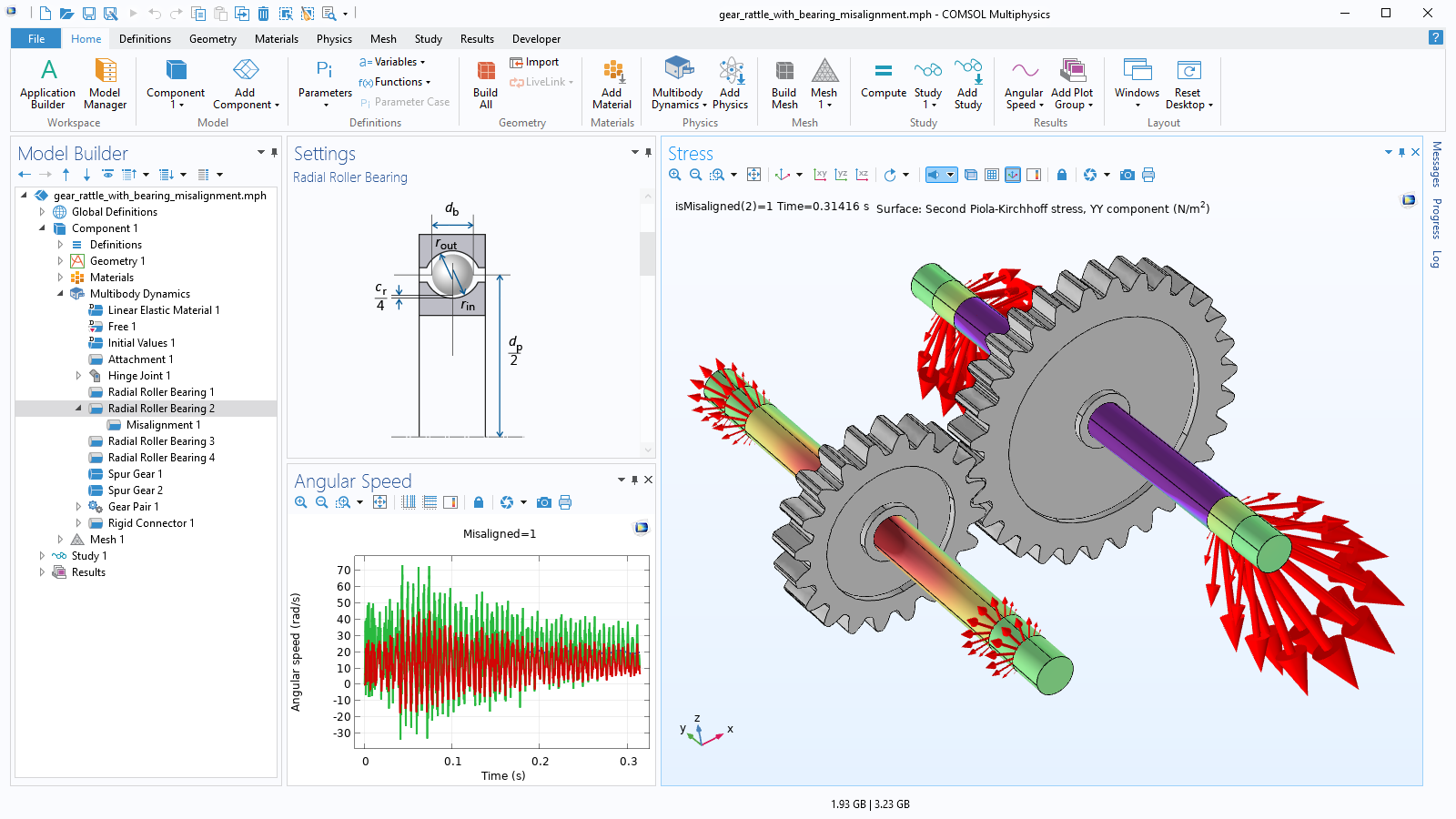
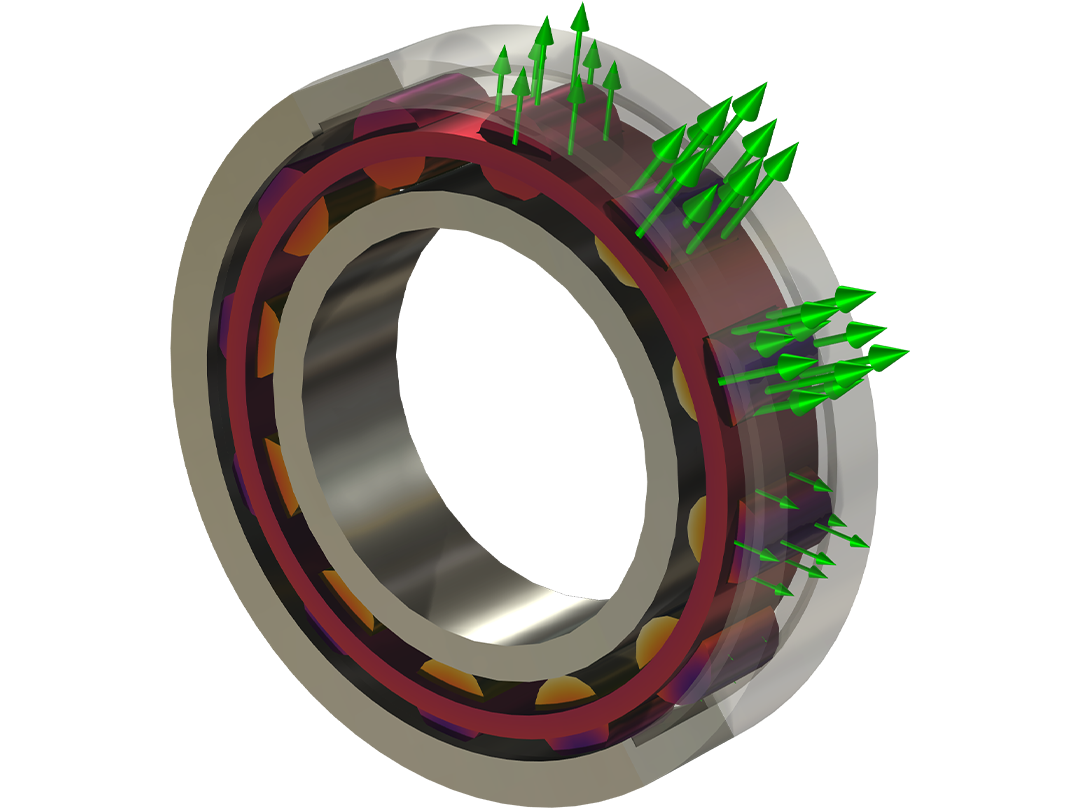
Радиальные роликовые подшипники
Роликовые подшипники часто применяются для низкоскоростных применений, где шум не является важным фактором. Эти подшипники имеют ограниченный срок службы, особенно при смещении, но их легко заменить благодаря низкой стоимости.
Модуль многотельной динамики вместе с модулем роторной динамики предоставляет следующие различные типы заранее определённых радиальных роликовых подшипников в 3D:
- Глубокий канавочный шар
- Угловой контактный шар
- Самовыравнивающийся шар
- Сферический ролик
- Цилиндрический ролик
- Конический ролик
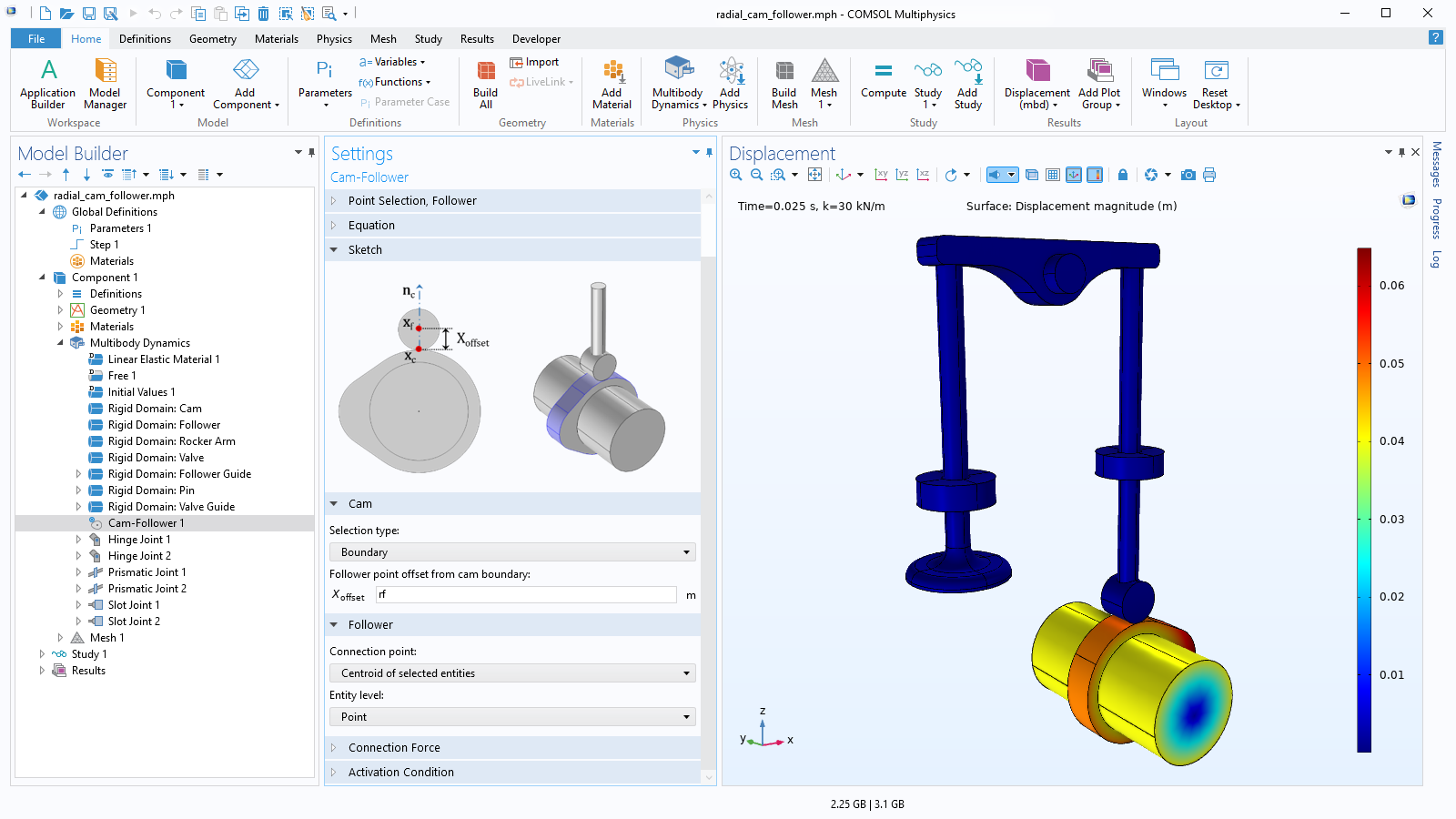
Связь Cam–Follower
Функция соединения Cam-Follower используется для моделирования упрощённого контакта путём применения двунаправленного ограничения между кулачком и его фоллоуером. Система кам–фоллоуэр определяется через набор границ или рёбер, за которыми следует точка. Кулачок можно определить как на жёстких телах, так и на упругих. Таким образом, кулачковые границы или рёбра могут подвергаться любому жесткому движению или деформации тела.
Эта функция позволяет нарисовать любой пользовательский профиль кулачка в виде геометрической модели и вычислять движение следоующего в виде кривых смещения, скорости и ускорения. Также можно вычислить силу соединения в точке контакта и, посмотрев на знак силы соединения, предсказать прерывистый контакт между кулачком и следователем.
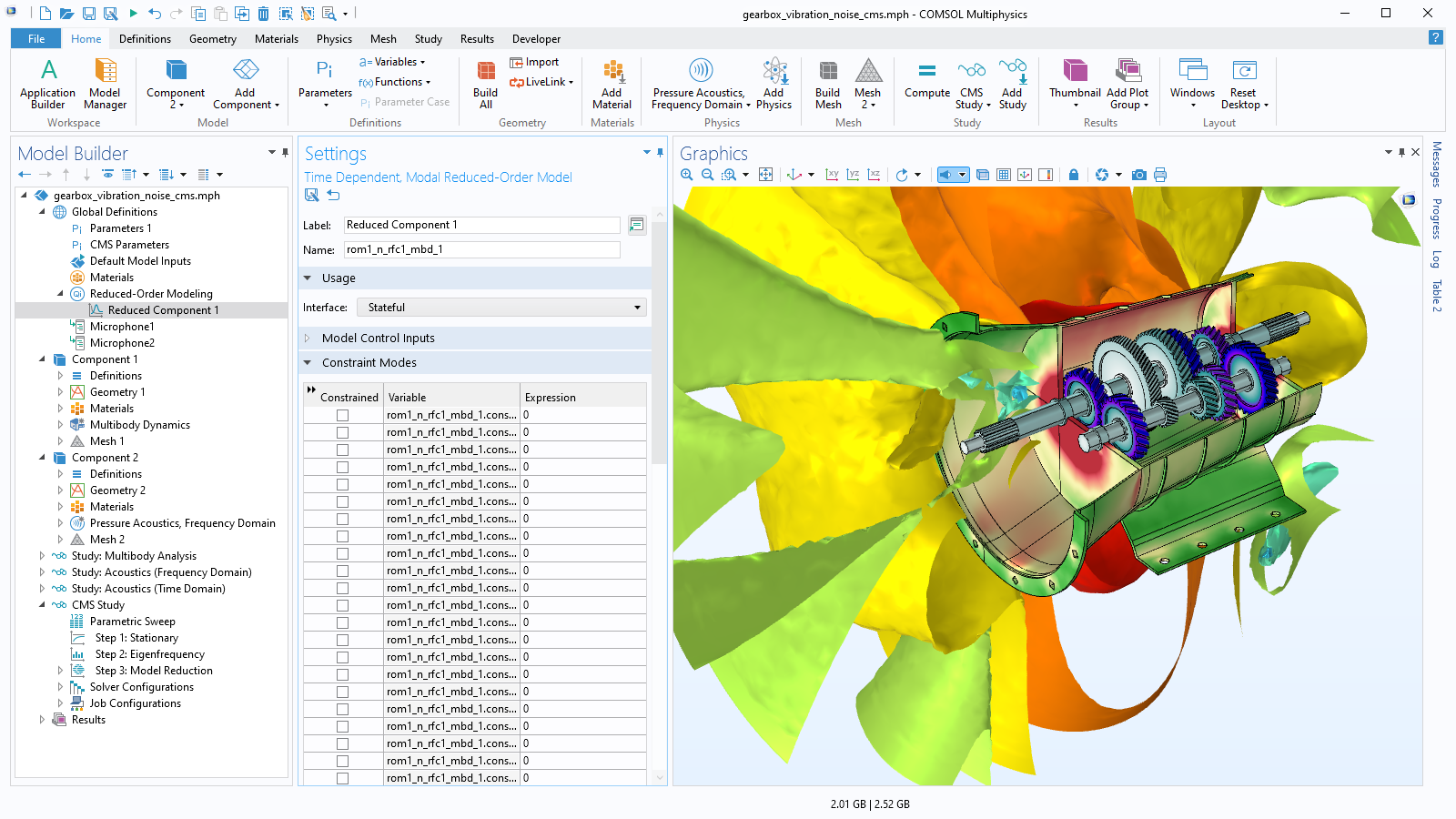
Синтез компонентного режима (CMS)
В модуле многотельной динамики возможно свести линейные компоненты к вычислительно эффективным моделям с уменьшенным порядком с помощью метода Крейга–Бэмптона. Такие компоненты затем могут использоваться в модели, полностью состоящей из редуцированных компонентов, или вместе с нередуцированными упругими моделями FE, где последние могут быть нелинейными. Этот подход, называемый синтезом компонентного режима или динамической субструктурированием, может значительно улучшить вычислительное время и использование памяти.
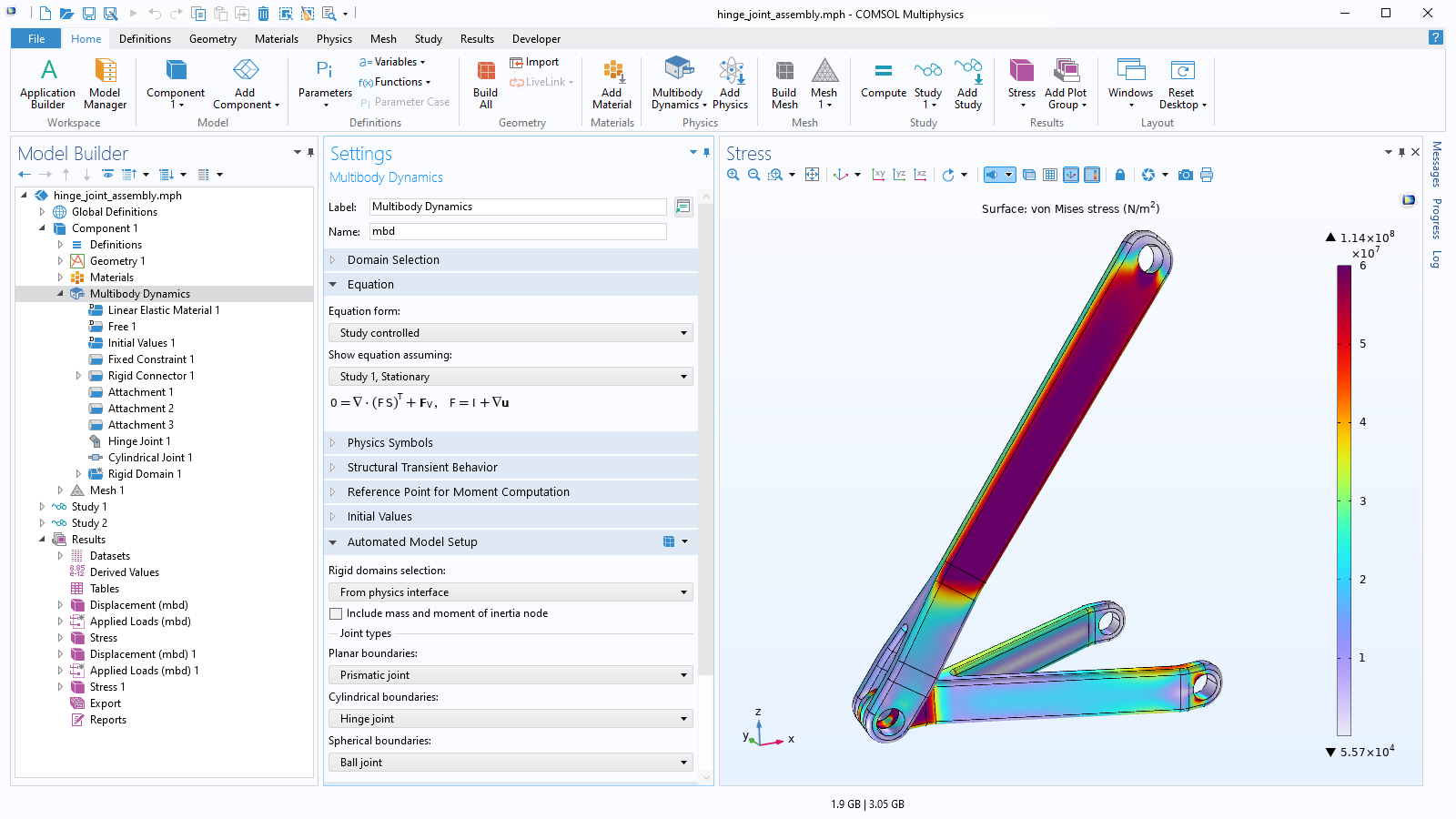
Коллекция соединений
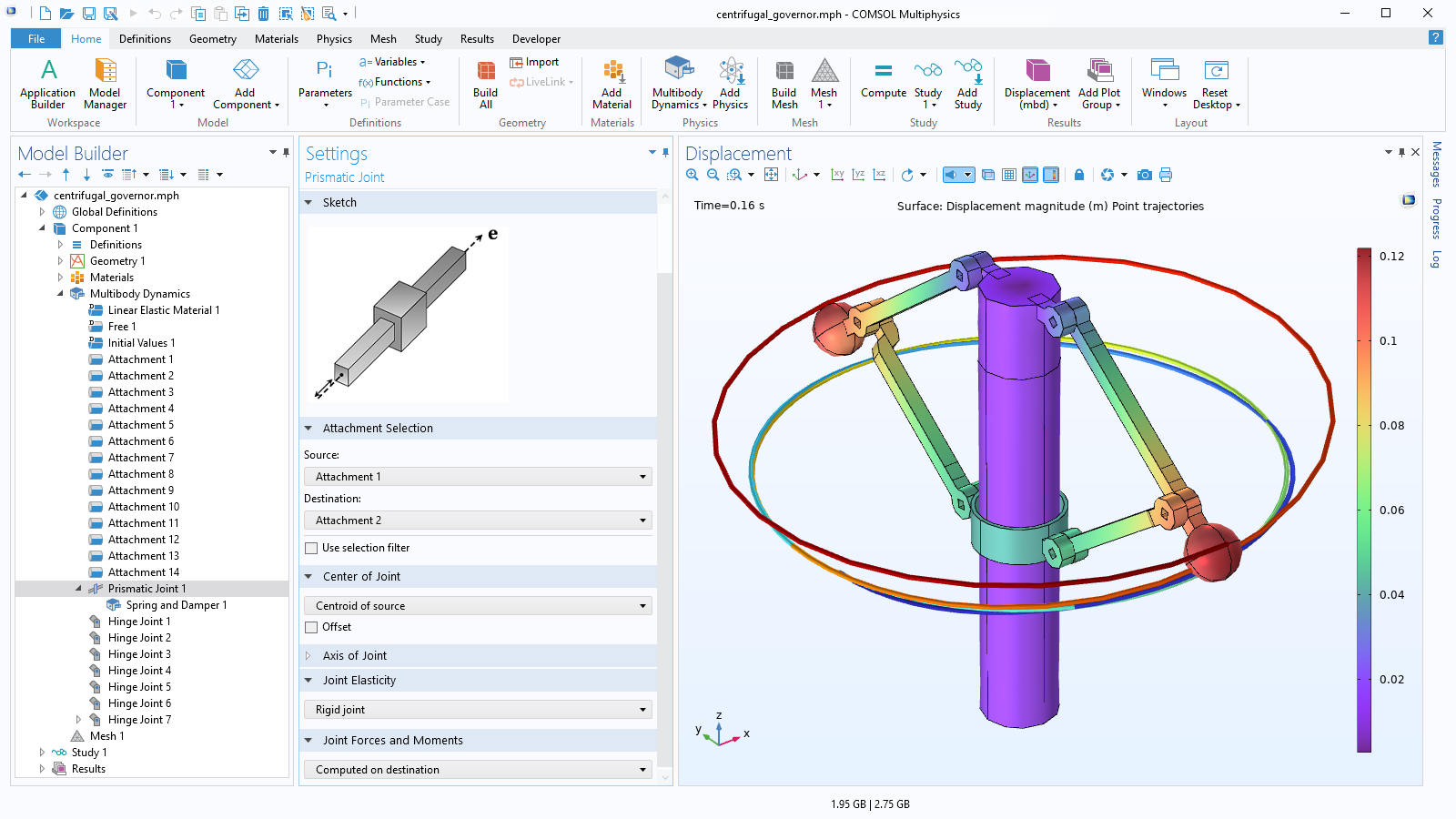
Для проектирования реалистичных многотелесных динамических систем модуль включает набор заранее определённых соединений. Относительное движение между взаимосвязанными многотелными компонентами ограничено в зависимости от типа соединения. Доступны следующие типы соединений:
- Призматический
- Петля
- Цилиндрический
- Винт
- Планарные
- Мяч
- Слот
- Уменьшенный слот
- Исправлено
- Расстояние
- Универсал
К соединениям могут применяться дополнительные свойства, такие как упругость, трение, ограничения (обеспечивающие максимальное движение) и фиксация.
Интерфейс Joints может использоваться для анализа механических узлов, соединённых различными типами соединений. Это также упрощает моделирование соединений внутри интерфейсов Solid Mechanics, Shell и Beam.
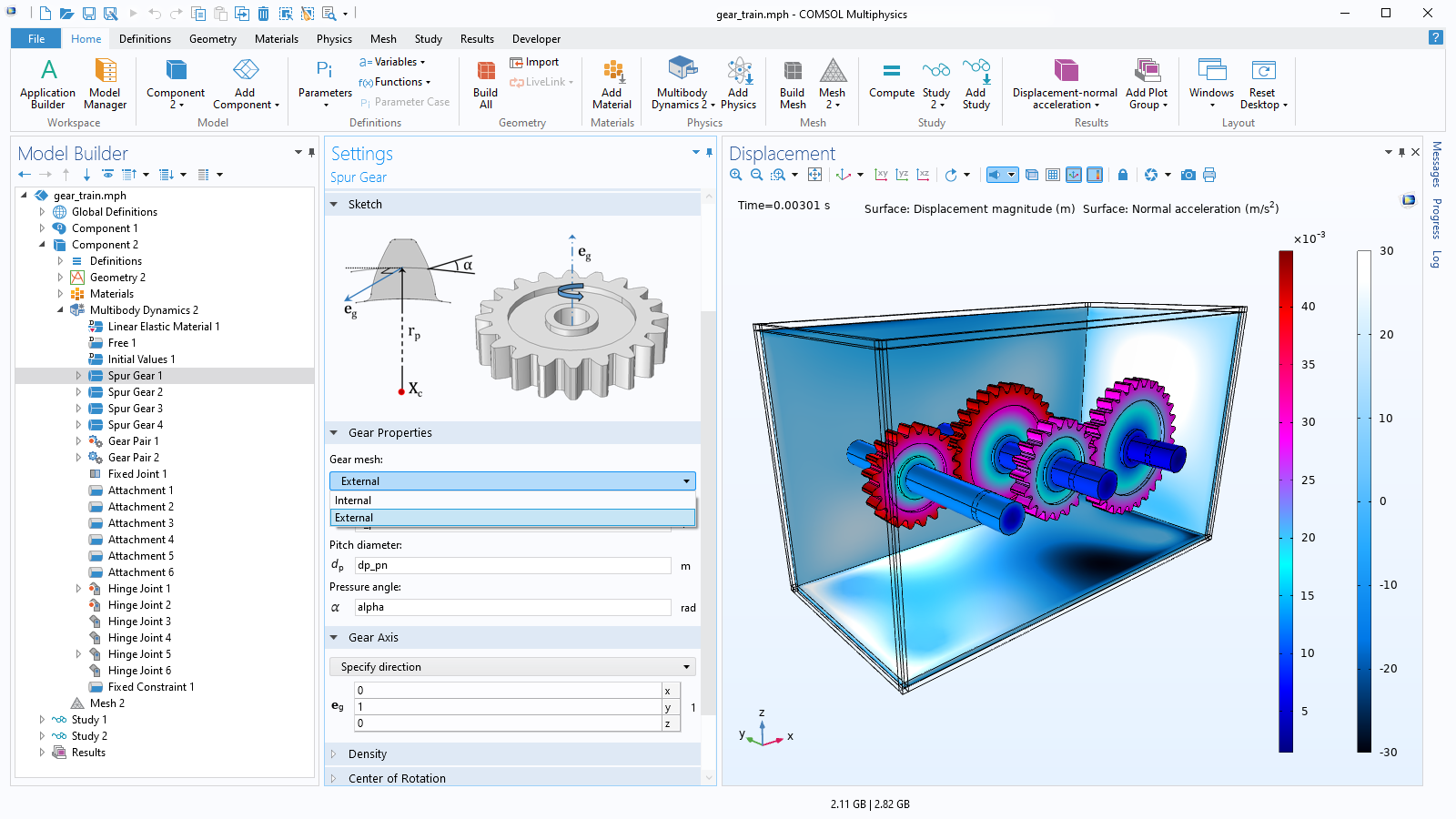
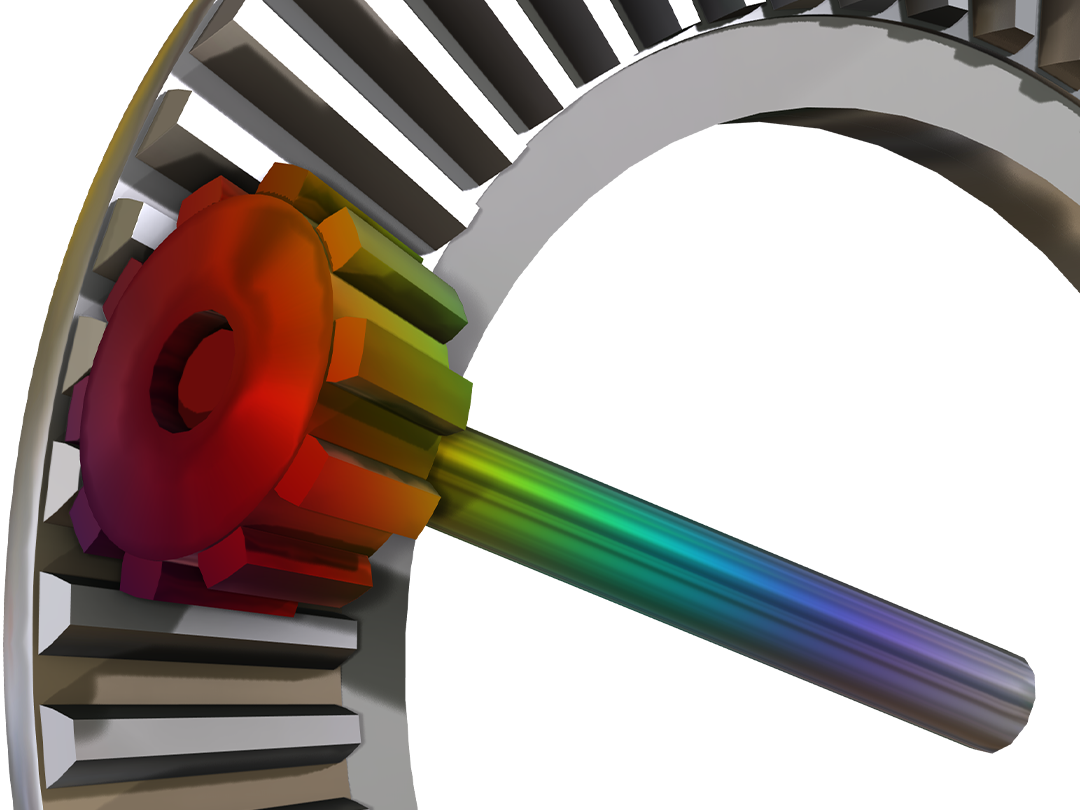
Коллекция шестерёнок и реек
Включена коллекция заранее определённых шестерен и рейок для легкого и надёжного создания моделей систем трансмиссии с множеством движущихся частей. Он помогает определить правильную пару шестерёнок, автоматически проверяя критерии сопоставимости правильного соединения зубьев шестерёнок. Шестерни могут устанавливаться на жёсткий или гибкий вал как напрямую, так и с помощью петель и втулок.
Чтобы сделать модель трансмиссии более точной и реалистичной, пара передач может также включать упругость, ошибку передачи, люфт и трение. Доступны следующие типы шестерёнок и рейок:
- Шпоры, внешнее
- Шпорное шестерня, внутреннее
- Спиральная шестерня, внешняя
- Спиральная шестерня, внутренняя
- Скосная шестерня
- Червячная передача
- Ответвляющая стойка
- Геликальная стойка
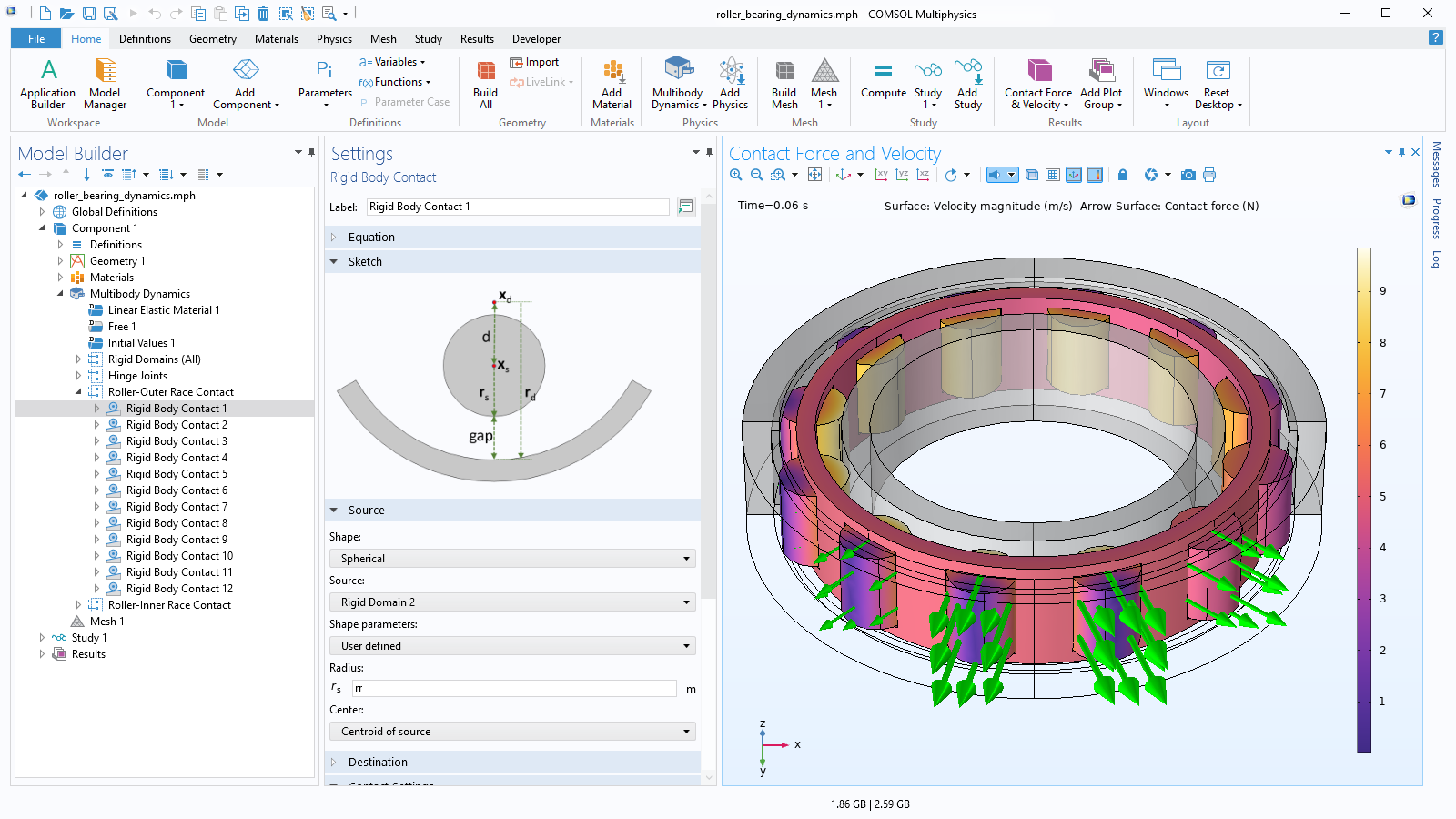
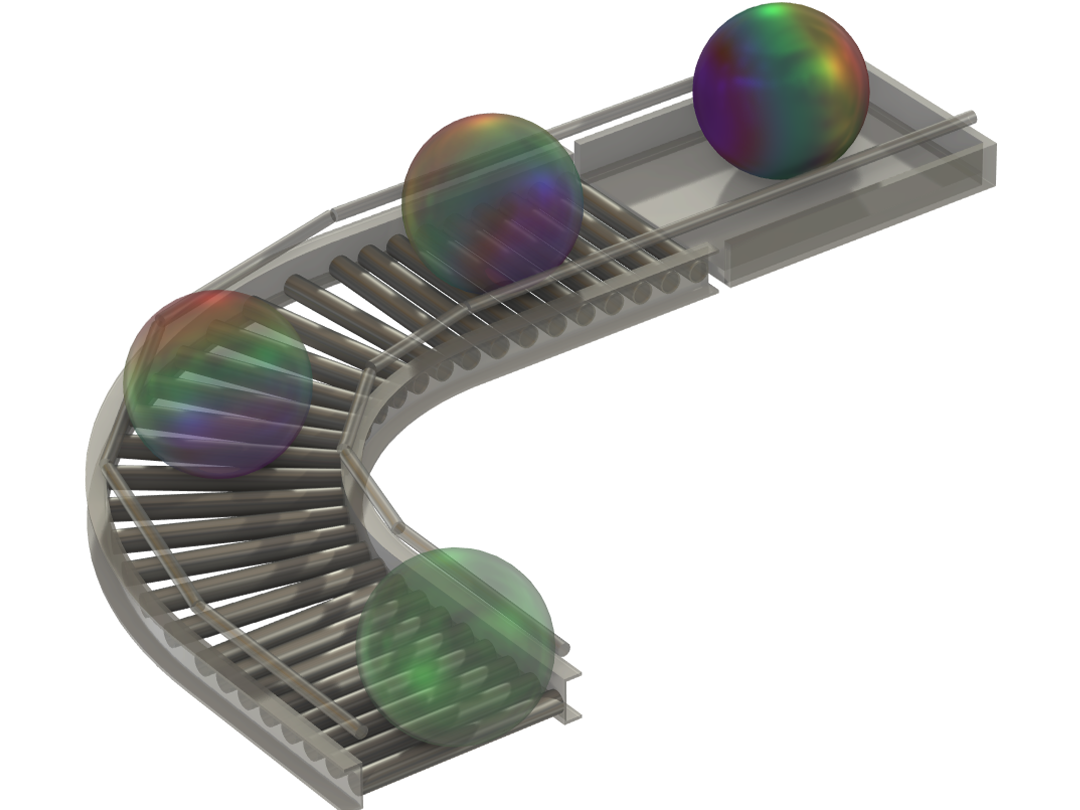
Жесткий контакт тела и трение
Для моделирования механического контакта между жёсткими телами доступна функция Rigid Body Contact для моделирования бессетчатых контактов между стандартными жёсткими телами. В зависимости от формы источника и целевых тел доступны различные типы формулировок:
- От сферической к сферической
- От сферической к цилиндрической
- От сферической к плоской
- От сферической к произвольной
- От цилиндрической к цилиндрической
- От цилиндрической к плоской
В дополнение к формулировкам с жёстким телом, существует общая формула для распределённого контакта между двумя телами, где хотя бы одно из них гибко.
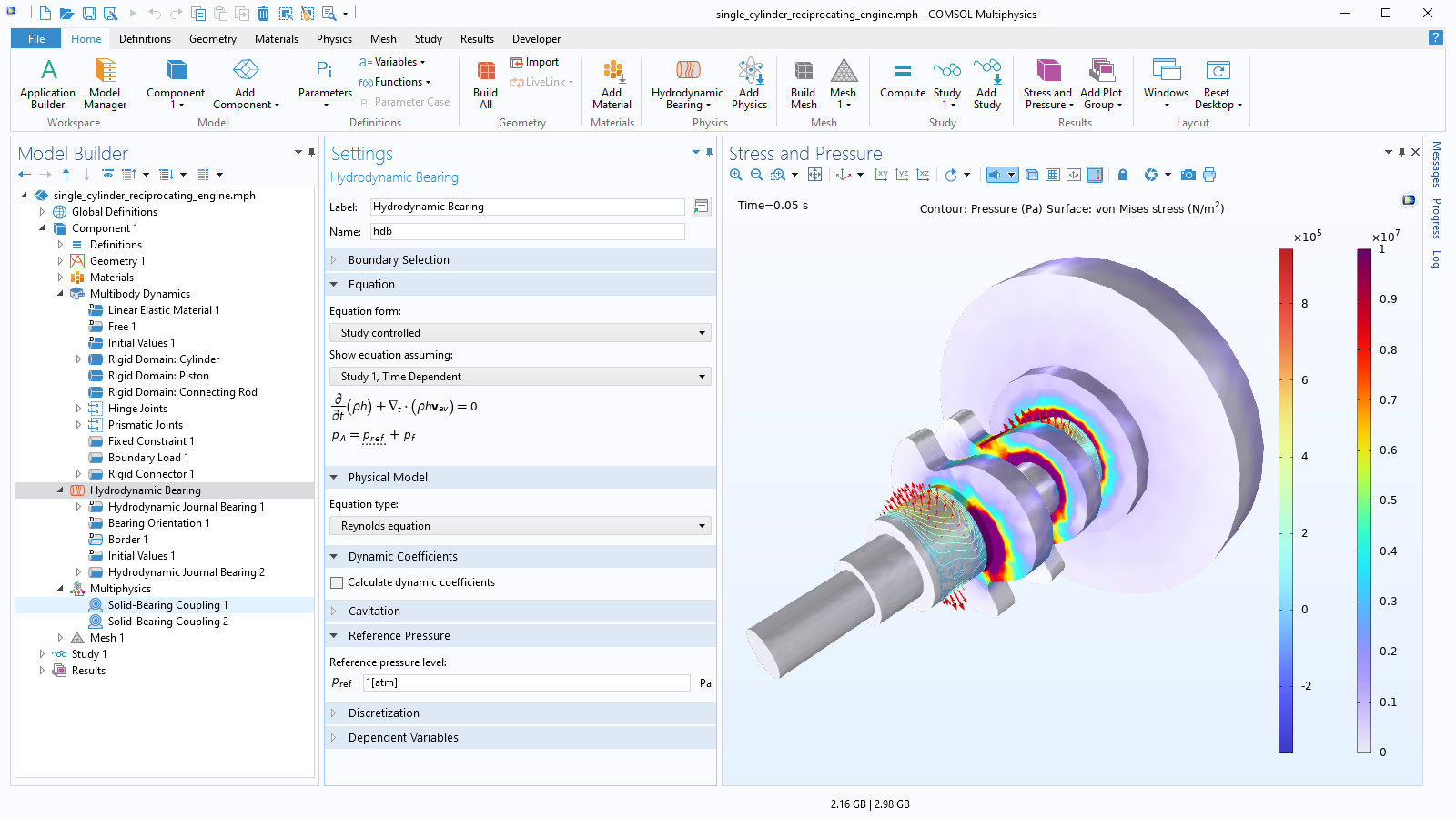
Гидродинамические подшипники
Проведение многокорпусного анализа гидродинамических подшипников требует соединения с интерфейсом гидродинамических подшипников в модуле ротординамики. Интерфейс предназначен для анализа подшипников жидкой пленки в 3D, эффективно моделируемых с использованием геометрии поверхности. Когда в модели присутствуют интерфейсы многотельной динамики и гидродинамического подшипника, доступна мультифизическая муфта с твердоподшипниковым соединением, позволяющая моделировать следующие подшипники в многотельной системе:
- Простой журнал
- Эллиптический журнал
- Журнал с разделёнными половинами
- Многолепный журнал
- Журнал с наклонённой площадкой
Библиотека частей
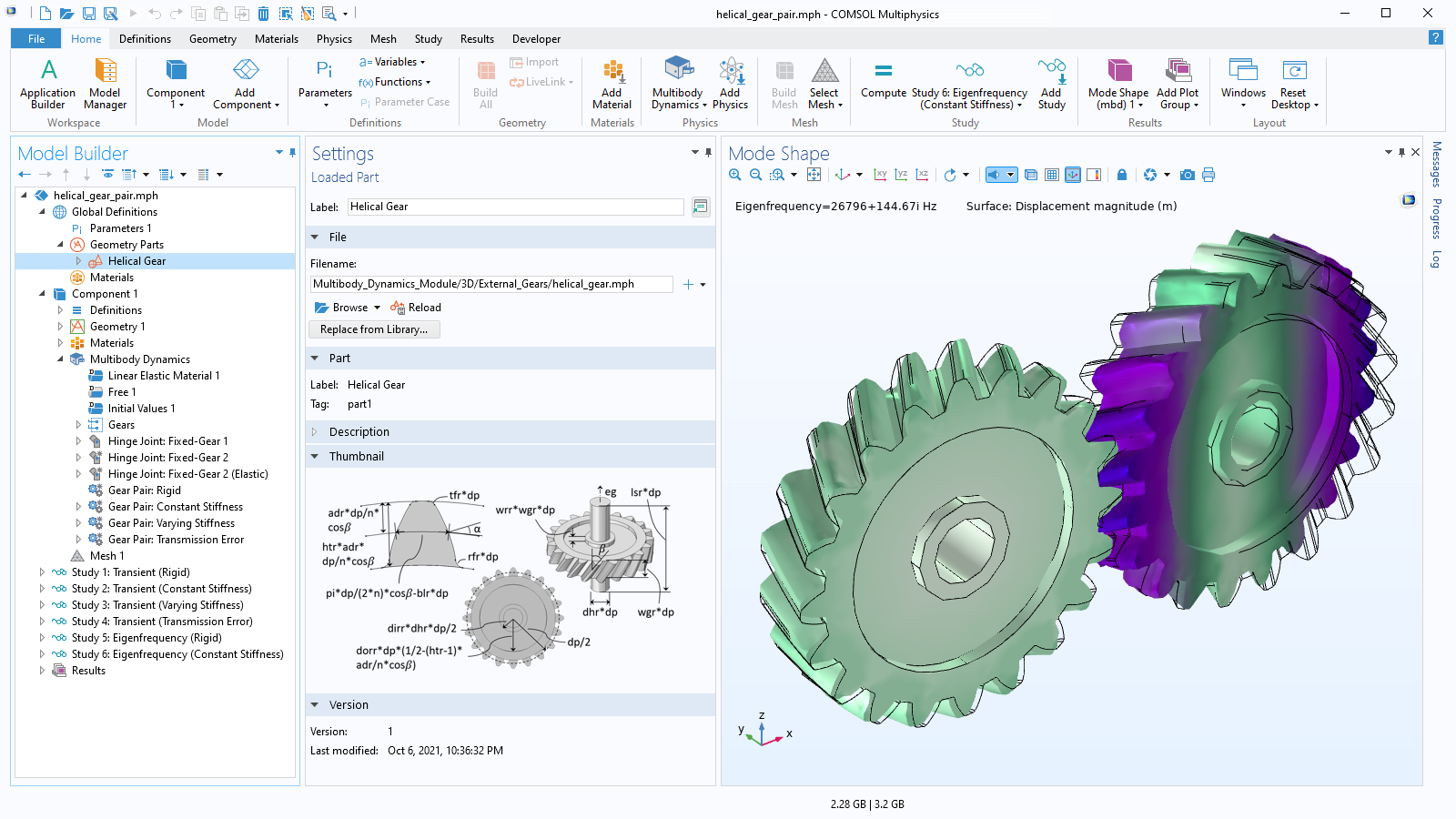
Модуль многотельной динамики содержит встроенную библиотеку деталей для создания различных типов шестерен в 2D и 3D. Детали можно использовать для изготовления зуба шестерни, одной шестерни, пары шестерен или шестерённого механизма. Все геометрии шестерёнок параметризированы, а входные параметры можно изменять для настройки формы зуба зуба или заготовки шестерёнки. Чтобы избежать построения некорректной геометрии, существует функция, проверяющая согласованность значений входных параметров.
Поскольку характеристики шестерни являются чисто математическими описаниями, геометрические части в основном используются для визуализации. Однако их также возможно использовать для детализированных моделей FE. Аналогично, доступны параметризованные детали для звёздочек и роликовых цепей.
Мультифизические связи для расширенного анализа динамики многотел
Легко сочетать два или более физических взаимодействий, все в одной программной среде.
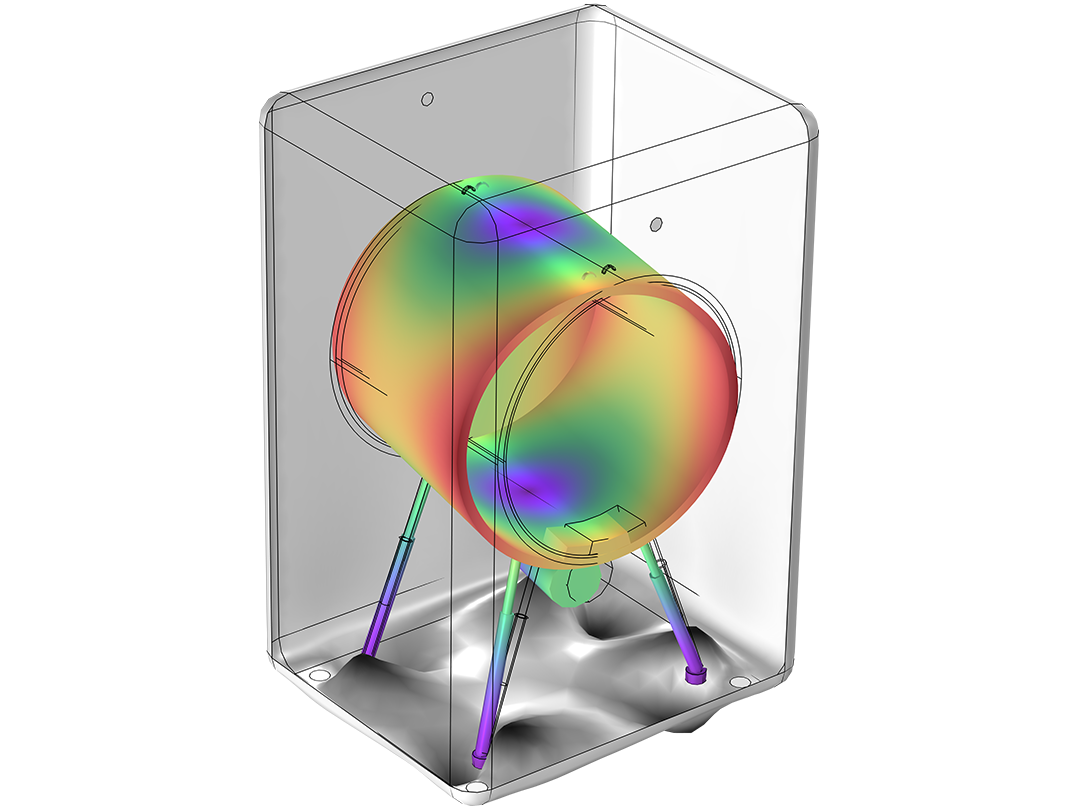
 Виброакустика
Виброакустика
Проведите многотельный анализ для вычисления акустических вибраций и шума.1
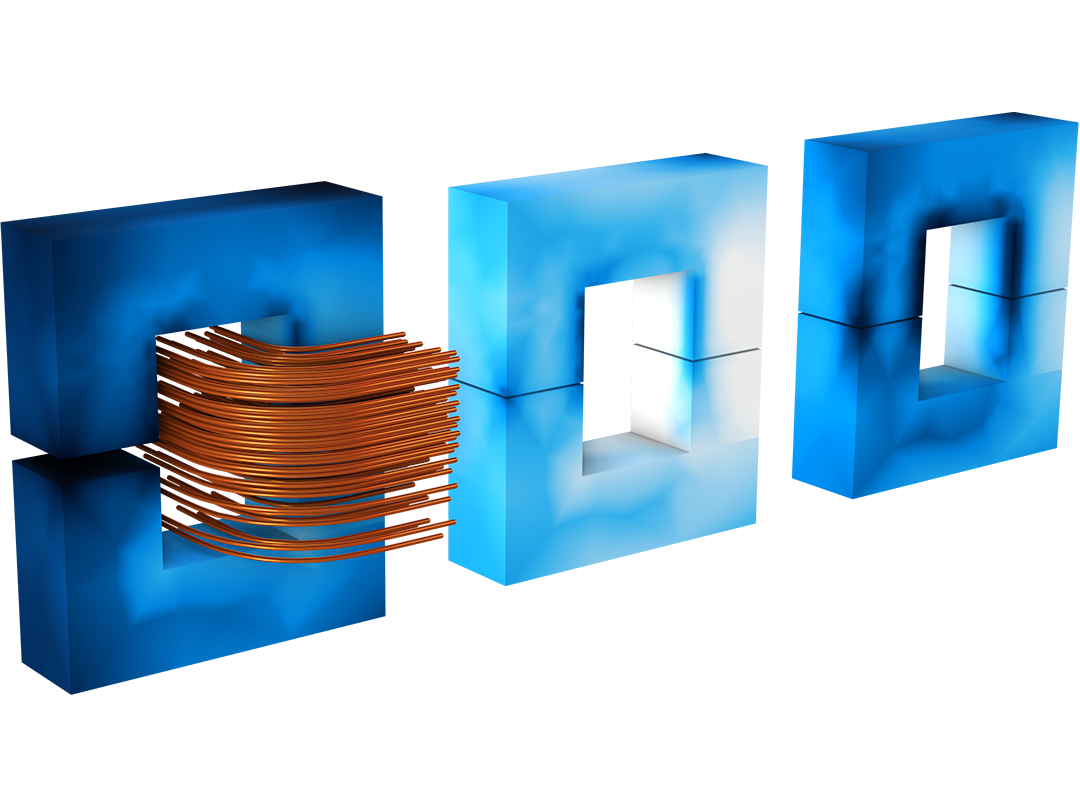 Электромеханические устройства
Электромеханические устройства
Моделировать динамику жестких тел под воздействием магнитных сил или индуцированных токов.2
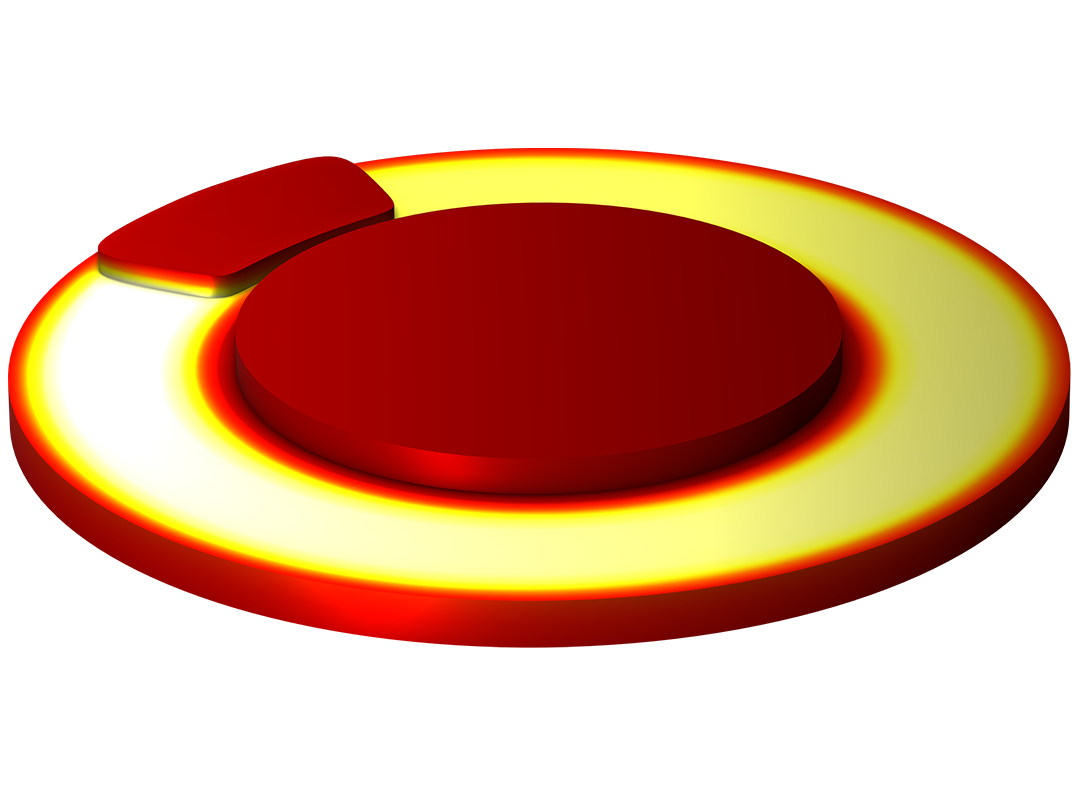 Тепловое расширение
Тепловое расширение
Анализировать трение и тепловое расширение.3
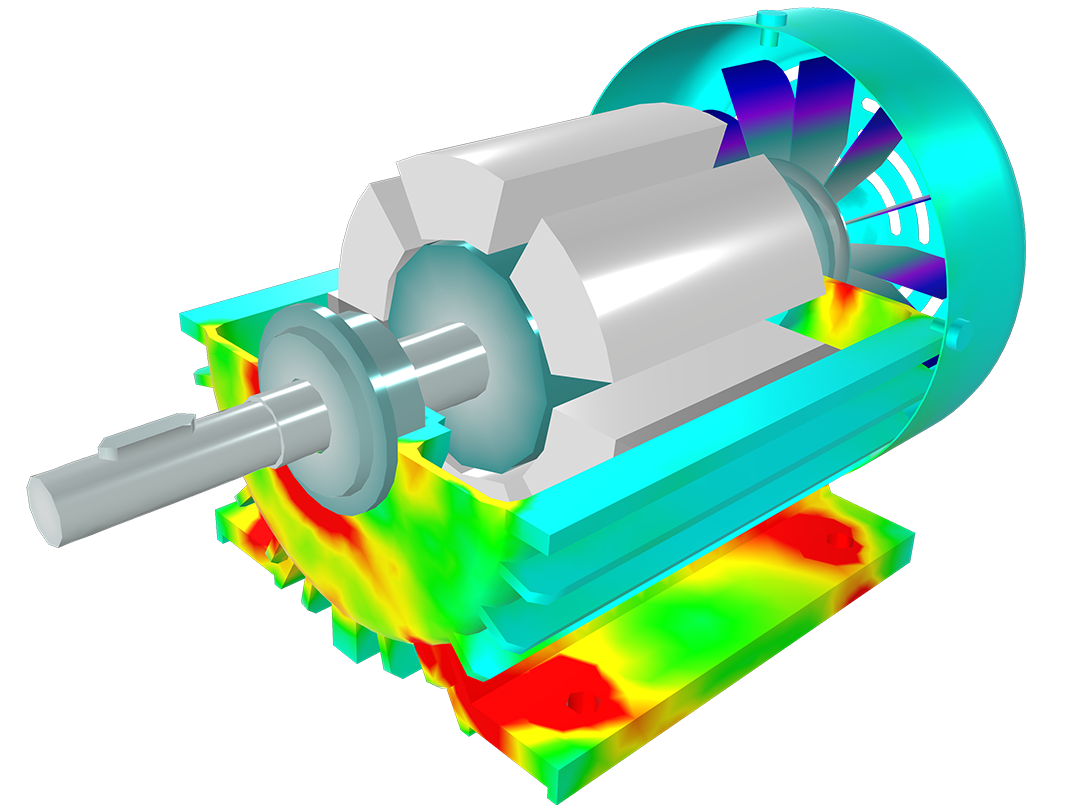
 Роторная динамика
Роторная динамика
Комбинируйте симуляцию подшипника с многотелесной симуляцией.4
 Структурная механика
Структурная механика
Дополняйте модели многотельной динамики общей структурной механикой для моделирования, например, балок, оболочек и нелинейных материалов.5
 Электромагнетизм и вибрация
Электромагнетизм и вибрация
Моделировать электромагнитные эффекты и вибрации в 2D и 3D.2
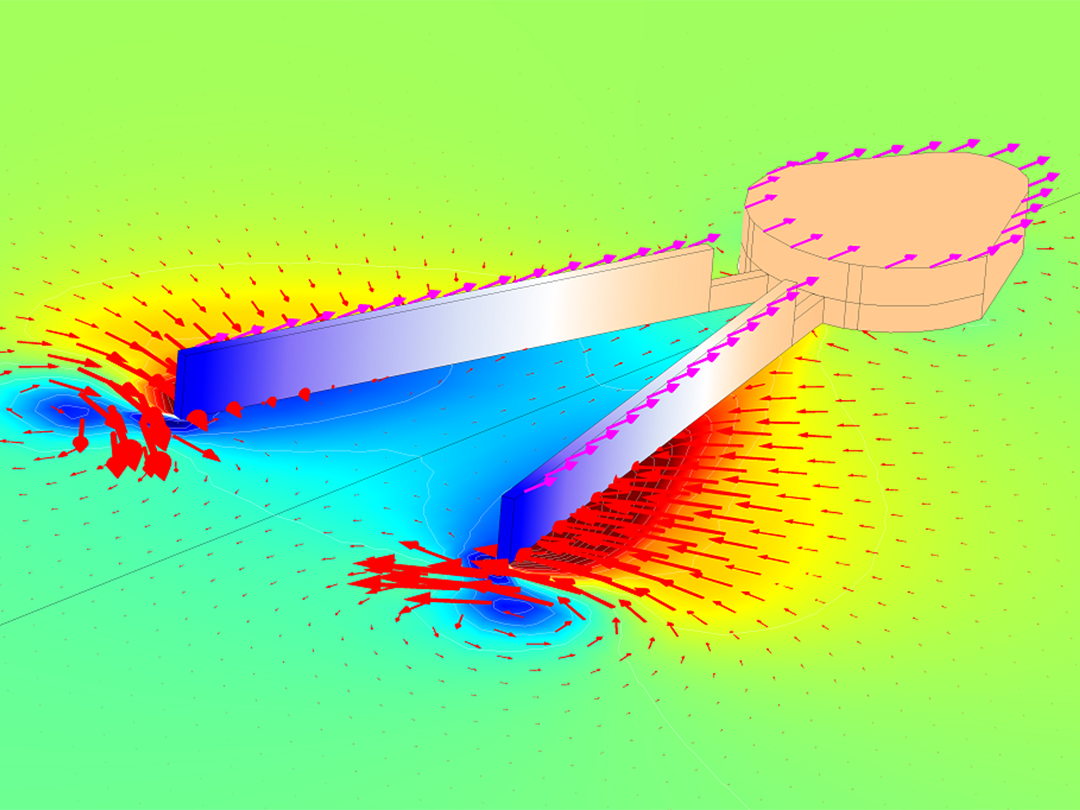 Взаимодействие жидкости и многотела
Взаимодействие жидкости и многотела
Моделирование явлений, при которых жидкость и жёсткое или деформируемое тело взаимодействуют друг на друга.
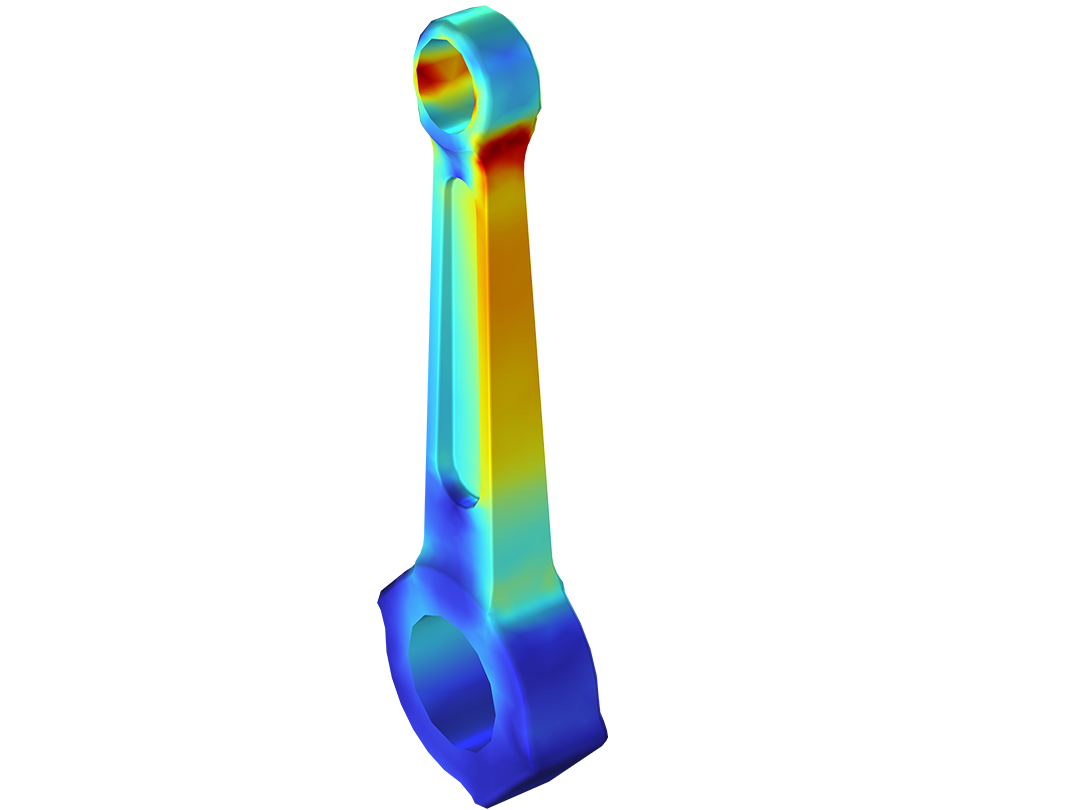 Усталость
Усталость
Проведите анализ усталости критически гибких тел.6
| Основные | |
|---|---|
| Производитель | EMC |
- Цена: Цену уточняйте